Rux Robot Android/Linux Debian Dual System Switching Tutorial
Rux Robot comes with a built-in dual system. After upgrading to the full root access version of the ROM, it’s possible to switch the operating system running on the robot from Android to Linux for development purposes. However, it’s important to note that this operation is recommended for advanced users only.
The robot’s built-in Android version is Android 11, and the included Linux system version is Debian 10.
Install ADB tools on the computer in advance
Please install the ADB tool on your computer according to the official tutorial
ADB driver:
https://developer.android.google.cn/studio/run/win-usb?hl=zh-cn
SDK platform tools:
https://developer.android.google.cn/studio/releases/platform-tools?hl=zh-cn
Brush the robot to the full Root version ROM
View:https://global.letianpai.com/all/?p=1680&v=8528837ceeea
Power on and enter Android system
The robot can be powered on by connecting it to a power adapter via a data cable or by placing it on the original built-in wireless charging board
Android Switch to Debian System
In Android system mode, connect the robot to the computer through an original data cable or a data cable with data transmission capabilities.
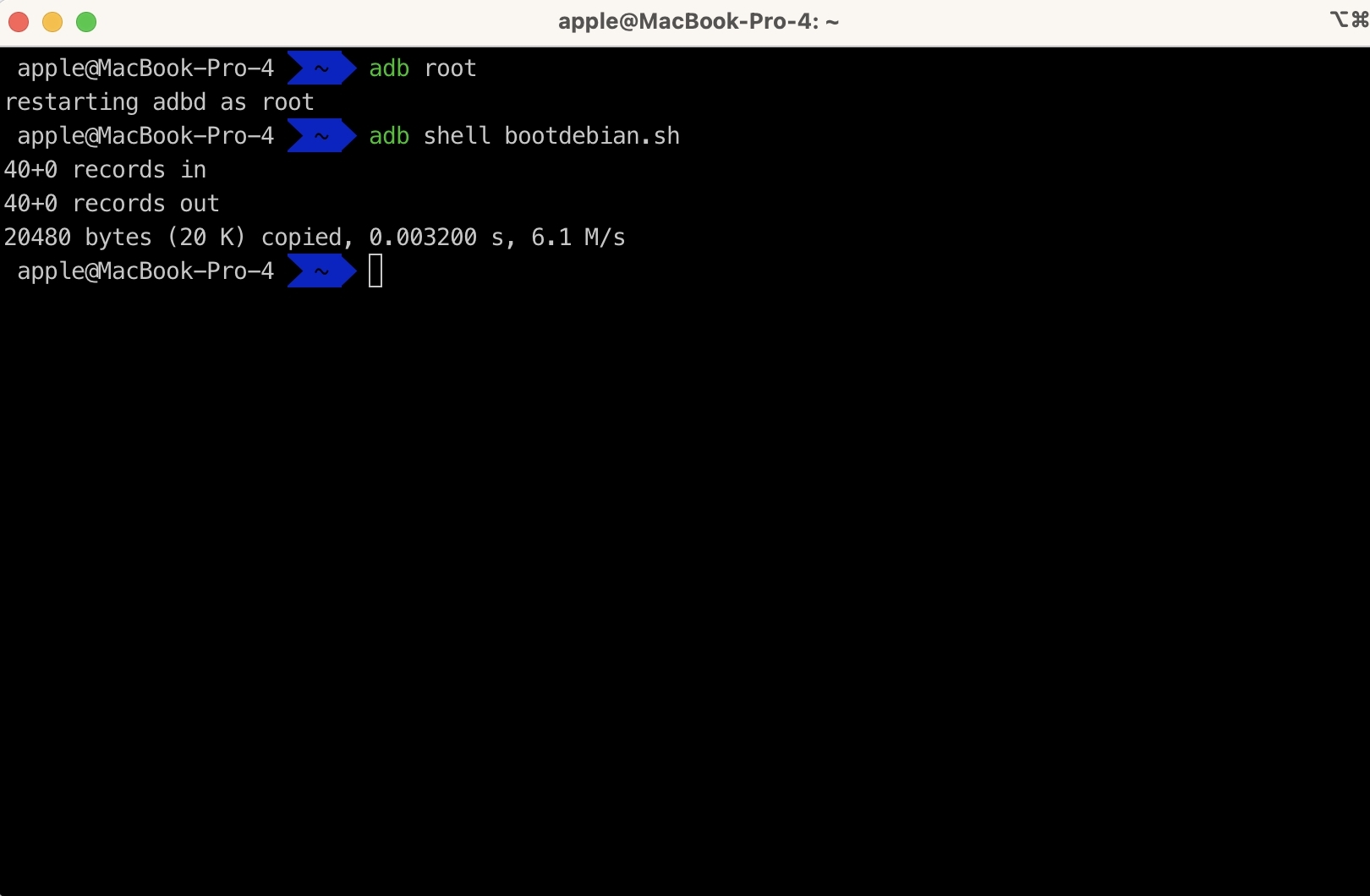
Open the ADB window and use the ADB shell to switch from Android to Debian systems. The command is as follows:
Adb root
Adb shell bootdebian.shAfter completion, the robot will restart and enter the Linux system
Debian switches to Android system
In Debian system mode, connect the robot to the computer through an original data cable or a data cable with data transmission capabilities.
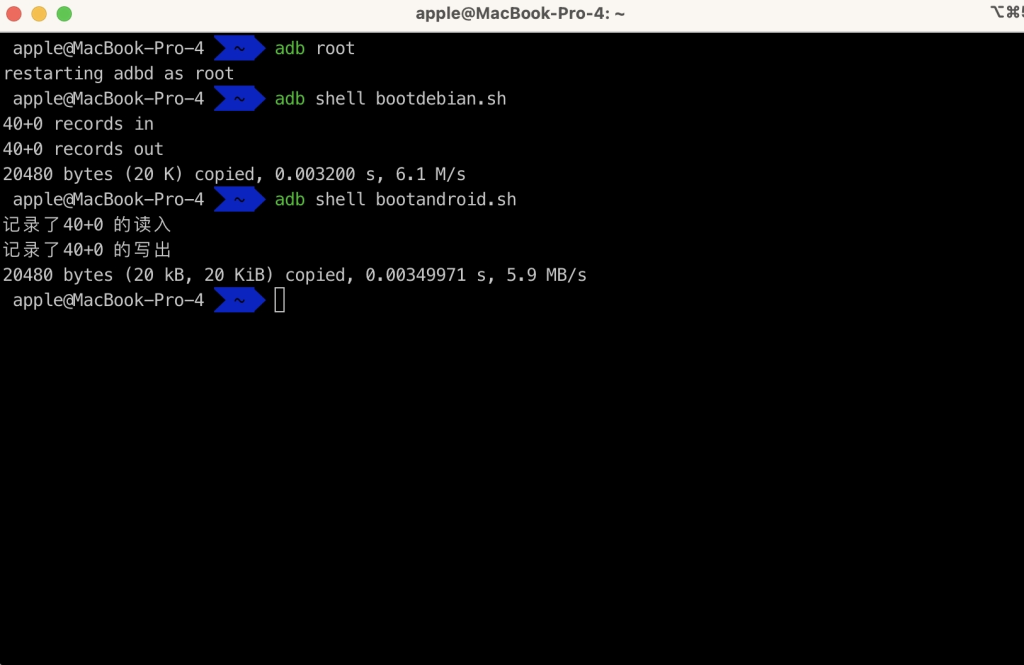
Open the ADB window and use the adb shell to switch from Debian to the Android system. The command is as follows:
Adb shell bootandroid.shAfter completion, the robot will restart and enter the Android 11 system
Precautions for Linux system operation:
When the robot switches to running Linux system through ADB command, if the data cable is unplugged and then plugged in, the computer will not be able to recognize the robot through ADB. You need to use a card needle, press the reset hole on the back for 5 seconds to force the device to shut down, then connect the computer and robot with a data cable and turn it on again to recognize it normally;
Linux system is a native system that provides developers with the maximum customization ability, and developers need to develop corresponding drivers themselves.
You May Also Like

“AI Summary” feature introduction of Rux Robot

How to Use the “AI Summary” Feature of Rux Robot
